How ReCAP Works
ReCAP adapts a policy to new tasks entirely at test time. Instead of teleoperating each new task and fine-tuning (~24 GPU-hours/task for Cosmos Policy), ReCAP appends cheap human-hand demonstrations to a retrieval pool while keeping the policy frozen. Key ideas:
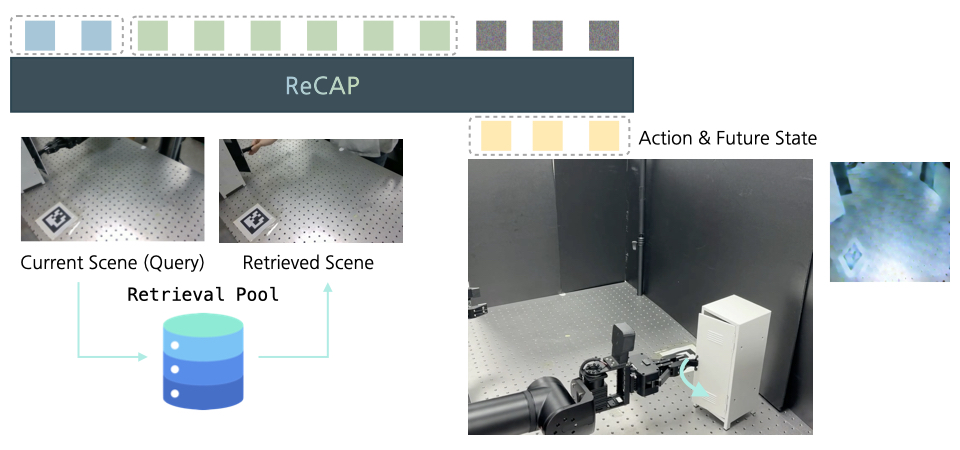
- Retrieval, not retraining. At every control step the frozen policy retrieves a matching state-action chunk from a growing pool database; new tasks are absorbed by extending the pool.
- Residual action parameterization. The retrieved pool chunk already encodes coarse motion, so the policy learns only the embodiment-specific correction on top.
- World-action backbone. Built on Cosmos Policy, the future-image prediction objective enforces consistency between the retrieved trajectory and the predicted evolution of the scene.